5. Parse Logger Files¶
Parse raw logger data and utility to handle raw data.
#|export
from numpy.typing import NDArray,ArrayLike
import re
import gzip
import numpy as np
import pandas as pd
from scipy.stats import linregress
import logging
from pyrnet import utils
# logging setup
logging.basicConfig(
filename='pyrnet.log',
encoding='utf-8',
level=logging.DEBUG,
format='%(asctime)s %(name)s %(levelname)s:%(message)s'
)
logger = logging.getLogger(__name__)
# Local variables
_nat = np.datetime64('NaT','ms')
_re_gprmc = re.compile('^(\d+,\d+ \d) \$GPRMC,(.*)(\*\w{2})$')
_re_adc = re.compile('^(\d+)(\s\d+)+$')
import matplotlib.pyplot as plt
5.1. Operations on the raw logger file¶
Open and read the binary files from the logger. These files have a header of 8 lines.
If the Logger receives power, it immediately starts to write data to the file. The first voltage measurements are good, but the GPS signal needs some time to establish.
If Logger writes data item per item, so if turned off, the file ends in an incomplete line most of the time. Sometimes, the last information is a GPS line. These events have to be handled.
5.1.1. Reading the raw logger file:¶
#|dropout
fname = "../../example_data/Pyr9_000.bin"
if fname[-3:]=='.gz':
f = gzip.open(fname,'rt',errors='ignore') # open in text mode, ignore non UTF8 characters
else:
f = open(fname,'r',errors='ignore')
lines =[l.rstrip() for l in f.readlines()]
f.close()
print("=====Header and Start of Data=====:")
print(*lines[:15], sep='\n')
print('\n...\n')
print("==========End of Data=============:")
print(*lines[-10:], sep='\n')
5.1.2. Cleanup¶
Skip almost empty files (data lines <20)
remove the last line as it is probably incomplete
check again if now a GPS line is the last line and remove it if so
# remove last line -> mostly damaged or empty
lines=lines[:-1]
# remove gps line at the end -> else processing issues
if _re_gprmc.match(lines[-1]):
lines=lines[:-1]
5.1.3. Divide GPS and ADC records¶
GPS and ADC lines have to be parsed separately
#|dropout
gpslines = []
adclines = []
for i,l in enumerate(lines):
m = _re_gprmc.match(l)
if m:
gpslines.append(l)
# -> send to parse_gps function
elif _re_adc.match(l):
adclines.append(l)
# -> send to parse_adc function
else:
# unhandled record...
pass
print("GPS lines:")
print(*gpslines, sep="\n")
print()
print("ADC lines:")
print(*adclines[:10], sep="\n")
print("...")
5.1.4. Parsing GPS¶
Workflow:
Look if GPS is available (Status:A) if not return nan
Read lat,lon and time information
Account for GPS rollover
The GPS chip in use has no automatic patch to account for GPS week integer rollover, which happend at 2019-04-06. Measurements taken after this date, have to add 1024 weeks to the date the GPS provides. Therefore this parsing function requires the measurement date (to process older campaigns).
#|export
def parse_gprmc(s, date_of_measure=np.datetime64('now')):
'''
Parse a string with a GPRMC GPS record
Parameters
----------
s: string
A GPRMC record
date_of_measure: datetime or datetime64
A rough time, when the measurements happen to account for GPS rollover.
Precise datetime is only necessary for the period of 2019-05-06 to 2019-08-17.
Otherwise, providing a year is sufficient.
The default is np.datetime64("now"), which is sufficient for all measurements conducted later than 2019-08-17.
Returns
-------
gprmc : tuple
A tuple with datetime64,status,lat,lon
'''
date_of_measure = utils.to_datetime64(date_of_measure)
# split fields of GPRMC record
f = s.split(',')
status = f[1]
if status=='A':
try:
# parse latitude
lat = float(f[2][:2])+float(f[2][2:])/60
if f[3]=='S':
lat *= -1.0
# parse longitude
lon = float(f[4][:3])+float(f[4][3:])/60
if f[5]=='W':
lon *= -1.0
if date_of_measure>np.datetime64("2019-04-06") and date_of_measure<np.datetime64("2019-08-17"): #account for gps week rollover
YY = '19'+f[8][4:6]
else:
YY = "20"+f[8][4:6]
mm = f[8][2:4]
dd = f[8][0:2]
HH = f[0][0:2]
MM = f[0][2:4]
SS = f[0][4:]
dt = np.datetime64(YY+'-'+mm+'-'+dd+'T'+HH+':'+MM+':'+SS,'ms')
if date_of_measure>np.datetime64("2019-04-06"): #account for gps week rollover -> date jump 1024 weeks back at 2019-04-06
dt= dt+np.timedelta64(1024,'W')
r = (dt,status,lat,lon)
except:
return (_nat,'V',np.nan,np.nan)
else:
r = (_nat,'V',np.nan,np.nan)
return r
5.1.5. Parse ADC¶
The ADC output are simple tab separated voltage values of the 5 analog input pins of the Logger.
5.1.5.1. ADC (3.3V, 10bit) Analog In Pins:¶
[0] Internal Battery measure
[1] Temperature sensor (0-5V, measured with voltage split)
[2] Humidity sensor (0-5V, measured with voltage split)
[3] Pyranometer main (0 -$\mathrm{gain}\mathrm{F}\mathrm{C}$ V)
[4] Battery (0-6V, measured with voltage split (same resistors))
[5] None
[6] Pyranometer secondary platform (0 - $\mathrm{gain}\mathrm{F}\mathrm{C}$ V)
[7] None
[8] None
with $\mathrm{gain}=300$, surface irradiance $\mathrm{F}$ of 0-1500 Wm-2, and calibration factor $\mathrm{C} < 8e-6 V,Wm-2$, the voltage range of the pyranometer sensors spans the full available range (0-3.3V) depending on the calibration factor.
None column won’t appear in raw output file
The first column is always milliseconds of processor runtime.
#|export
def parse_adc(s):
'''
Parse an ADC record
Parameters
----------
s: string
The ADC record
Returns
-------
t: tuple
A tuple of digital counts of the ADC
'''
return tuple(map(int,s.split()))
5.1.6. Putt all together¶
This function reads the logger file, separates GPS and ADC records, wich will be parsed by the functions introduced above. Then the data is collected
#|export
dtype_gprmc = [
( 'time', 'datetime64[ms]' ),
( 'status', 'S1' ),
( 'lat', 'f8' ),
( 'lon', 'f8' ),
( 'iadc', 'u4' )
]
def read_records(fname: str,
date_of_measure: np.datetime64 = np.datetime64('now')) -> (NDArray, NDArray):
'''
Read the GPRMC and ADC records from the pyranometer logger files
Parameters
----------
fname: string
The filename of the logger file
date_of_measure: numpy.datetime64
Date of measurement to account for gps rollover
Returns
-------
rec_adc: ndarray
The 10bit ADC readings
rec_gprmc: recarray
The GPRMC GPS records
'''
logger.info(f"Start reading records from file: {fname}")
date_of_measure = utils.to_datetime64(date_of_measure)
# Read file, use errors='ignore' to skip non UTF-8 characters
# non UTF-8 characters may arise in broken GPS strings from time to time
if fname[-3:]=='.gz':
f = gzip.open(fname,'rt',errors='ignore') # open in text mode, ignore non UTF8 characters
else:
f = open(fname,'r',errors='ignore')
lines =[l.rstrip() for l in f.readlines()]
f.close()
##- skip almost empty files
if len(lines)<20:
logger.info("Skip file, as number of records is < 20.")
return False,False
# remove last line -> mostly damaged or empty
lines=lines[:-1]
# remove gps line at the end -> else processing issues
if _re_gprmc.match(lines[-1]):
lines=lines[:-1]
rec_gprmc = []
rec_adc = []
iadc = 0
for i,l in enumerate(lines):
m = _re_gprmc.match(l)
if m:
r = parse_gprmc(m.group(2), date_of_measure)
if not np.isnat(r[0]):
# add number of adc values before GPS line
rec_gprmc.append(r+(iadc,))
elif _re_adc.match(l):
r = parse_adc(l)
if iadc==0:
adc_len=len(r)
# if record line is incomplete (due to power cut off)
# the line is dropped
if len(r)==adc_len:
rec_adc.append(r)
iadc += 1
else:
# unhandled record...
pass
rec_adc = np.array(rec_adc,dtype=np.uint16)
rec_gprmc = np.array(rec_gprmc,dtype=dtype_gprmc).view(np.recarray)
logger.info("Done reading records from raw file.")
return rec_adc, rec_gprmc
rec_adc, rec_gprmc = read_records(fname)
#|dropout
rec_gprmc
#|dropout
rec_adc
5.2. ADC time to milliseconds from start¶
The logger stores internally counted milliseconds from power up. The values are stored as the milliseconds from the last second only, we need a function to add up the seconds for a continuous time stamp.
#|export
def get_adc_time(rec_adc):
"""
Get Milliseconds from Start of ADC measurement.
Parameters
----------
rec_adc: ndarray
The digital counts of the ADC from the logger file.
Returns
-------
ndarray
Milliseconds from start of the measurement.
"""
# get millisecond part
ta = rec_adc[:,0].astype('timedelta64[ms]')
# get time difference between records
dt = np.diff(ta)
dt[dt<np.timedelta64(-850,'ms')] += 1000
# get cummulative time offset rel. to first ADC record
ta[0] = 0
ta[1:] = np.cumsum(dt)
return ta
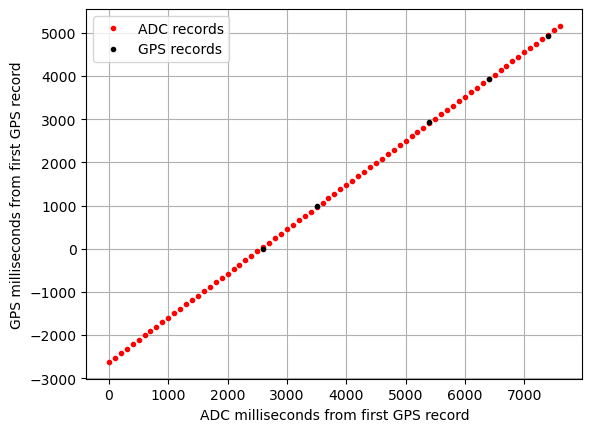
5.3. Sync GPS time to ADC records¶
The ADC is timed internally by the processor clock. This is prone to be not accurate. The following function attaches the GPS time to ADC samples in between two GPS lines by linear regression.
# get millisecond part
ta = get_adc_time(rec_adc)
### 2. Get logger clock for GPRMC records
# get time of previous ADC record
t1 = ta[rec_gprmc.iadc]/np.timedelta64(1,'ms')
# time of GPS records from GPRMC record
t2 = (rec_gprmc.time-rec_gprmc.time[0])/np.timedelta64(1,'ms')
a,b = linregress(t1,t2)[:2]
t = rec_gprmc.time[0]+ta*a+b.astype('timedelta64[ms]')
fig,ax = plt.subplots(1,1)
_ = ax.plot(ta/np.timedelta64(1,'ms'),
a*ta/np.timedelta64(1,'ms')+b,
'r.', label='ADC records')
_ = ax.plot(t1,t2,'k.', label='GPS records')
_ = ax.grid(True)
_ = ax.legend()
_ = ax.set_ylabel("GPS milliseconds from first GPS record")
_ = ax.set_xlabel("ADC milliseconds from first GPS record")
fig.show()
#|export
def sync_adc_time(adctime, gpstime, iadc, check_results=True):
'''
Synchronize the ADC time to the GPS records
Parameters
----------
adctime: ndarray
Milliseconds from start of the ADC measurement.
gpstime: ndarray
GPS time
iadc: ndarray of int
Index of the last ADC sample before a GPS record has been stored.
check_results: bool
If True, check plausibility of fitted slope and offset (abs(slope)<10s/day; abs(offset)<2s).
The default is True
Returns
-------
time: ndarray(datetime64[ms])
The time of the ADC records
'''
# assure milliseconds
ta = adctime.astype('timedelta64[ms]')
# assure int type
iadc = np.array(iadc).astype(int)
# get GPStime of the previous ADC record
# here we assume, that the last ADC sample stored before a GPS record
# has the same time as the GPS timestamp
t1 = ta[iadc]/np.timedelta64(1,'ms')
# time of GPS records from GPRMC record
t2 = (gpstime-gpstime[0])/np.timedelta64(1,'ms')
a,b = linregress(t1,t2)[:2]
t = gpstime[0]+ta*a+b.astype('timedelta64[ms]')
drift = (1/a-1)*86400
logger.info('Sync ADC time to GPS Fit Summary:')
logger.info('|-- Drift : {0:7.2f} [s/day]'.format(drift))
logger.info('|-- Slope : {0:13.8f}'.format(a))
logger.info('|-- Offset : {0:7.2f} [s]'.format(b/1000))
logger.info('|-- Jitter : {0:7.2f} [ms]'.format(np.std(t2-(a*t1+b))))
if check_results:
if np.abs(drift)>10:
logger.warning("Absolute ADC drift larger than 10 s/day.")
return None
return t
#|dropout
adctime = get_adc_time(rec_adc)
time = sync_adc_time(
adctime=adctime,
gpstime=rec_gprmc.time,
iadc=rec_gprmc.iadc,
check_results=False
)
time
5.4. Binning of ADC values¶
The original time resolution is about 10Hz. Here we apply binning of ADC samples to a regular spaced time grid.
We declare bins as the desired number of bins per day, e.g. bins = 86400 one bin every second.
# Desired bins per day
bins = 86400
Now we can calculate the bin number each sample is assigned to.
# starting day
t0 = time[0].astype('datetime64[D]')
# convert time to 'days from t0'
dday = (time-t0)/np.timedelta64(1,'D')
# calculate the bin number assigned to every sample
it = np.int64(dday*bins)
it
array([40861, 40861, 40861, 40861, 40861, 40861, 40862, 40862, 40862,
40862, 40862, 40862, 40862, 40862, 40862, 40862, 40863, 40863,
40863, 40863, 40863, 40863, 40863, 40863, 40863, 40864, 40864,
40864, 40864, 40864, 40864, 40864, 40864, 40864, 40864, 40865,
40865, 40865, 40865, 40865, 40865, 40865, 40865, 40865, 40865,
40866, 40866, 40866, 40866, 40866, 40866, 40866, 40866, 40866,
40866, 40867, 40867, 40867, 40867, 40867, 40867, 40867, 40867,
40867, 40867, 40868, 40868, 40868, 40868, 40868, 40868, 40868,
40868, 40868, 40869, 40869, 40869])
Calculate number of samples per bins (cnt) and a bin index starting with the first bin (inv_idx)
uval,inv_idx,cnt = np.unique(it,return_inverse=True,return_counts=True)
uval,inv_idx,cnt
(array([40861, 40862, 40863, 40864, 40865, 40866, 40867, 40868, 40869]),
array([0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2,
2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 4, 4, 4, 4, 4, 4, 4, 4, 4,
4, 5, 5, 5, 5, 5, 5, 5, 5, 5, 5, 6, 6, 6, 6, 6, 6, 6, 6, 6, 6, 7,
7, 7, 7, 7, 7, 7, 7, 7, 8, 8, 8]),
array([ 6, 10, 9, 10, 10, 10, 10, 9, 3]))
Now np.bincount can be used to calculate the average value of the samples in every bin.
binvalues = np.bincount(inv_idx,weights=rec_adc[:,2])/cnt
print('rec_adc values of the fist bin, 3rd column')
print(rec_adc[inv_idx==0,2])
print("Average calculated with bincount:")
print(binvalues[0])
rec_adc values of the fist bin, 3rd column
[322 322 322 322 324 324]
Average calculated with bincount:
322.6666666666667
Time values for each bin are assigned as the starting boundary of the sample times within the bin.
# assign bin time
bintime = t0+ np.timedelta64(86400000,'ms')*uval.astype(np.float64)/bins
print('sample time for the fist bin:')
print(time[inv_idx==0])
print("Assigned bin time:")
print(bintime[0])
sample time for the fist bin:
['2022-08-30T11:21:01.443' '2022-08-30T11:21:01.545'
'2022-08-30T11:21:01.647' '2022-08-30T11:21:01.750'
'2022-08-30T11:21:01.852' '2022-08-30T11:21:01.955']
Assigned bin time:
2022-08-30T11:21:01.000
#|export
def adc_binning(rec_adc, time, bins=86400):
"""
Binning and averaging of ADC samples
Parameters
----------
rec_adc: ndarray
The ADC records parsed from the logger.
time: ndarray of time objects
Sample time of ADC records.
bins: int
Number of desired bins per day. The default is 86400, which result in
mean values of 1 second steps per day. Maximum resolution is 86400000.
Returns
-------
ndarray, ndarray(datetime64)
Binned ADC records and corresponding time.
"""
time = utils.to_datetime64(time)
# starting day
t0 = time[0].astype('datetime64[D]')
# convert time to 'days from t0'
dday = (time-t0)/np.timedelta64(1,'D')
# calculate time bins of output dataset
it = np.int64(dday*bins)
# index for unique bins (inv_idx) and count of samples per bin (cnt)
uval, inv_idx, cnt = np.unique(it,
return_inverse=True,
return_counts=True)
logger.info(f"ADC records fill {len(uval)} bins of data.")
# Calculate average of sample values per bin
# The first two columns of rec_adc will be omitted as they store the
# internal measures for timing and battery (first two columns)
V = np.zeros((len(uval),rec_adc.shape[1]-2))
for i in range(V.shape[1]):
V[:,i] = np.bincount(inv_idx,weights=rec_adc[:,i+2])/cnt
bintime = t0+ np.timedelta64(86400000,'ms')*uval.astype(np.float64)/bins
logger.info(f"ADC records span a time period from {bintime[0]} to {bintime[-1]}.")
return V, bintime
In a similar way we can do it for a dataset:
#|export
def resample_mean(ds,freq='1s'):
# start and end bin time
start_time = np.datetime64(
pd.to_datetime(ds.time.values[0]).floor(freq)
)
end_time = np.datetime64(
pd.to_datetime(ds.time.values[-1]).floor(freq)
)
# bin time
bintime = pd.date_range(
start_time,
end_time,
freq=freq
).floor(freq)
ds_r = ds.assign_coords(
{
"time_resampled": ("time_resampled", bintime)
}
)
# calculate bin index of output dataset
it = np.int64(
(ds.time.values - start_time)/pd.Timedelta(freq)
)
# index for unique bins (inv_idx) and count of samples per bin (cnt)
uval, inv_idx, cnt = np.unique(it,
return_inverse=True,
return_counts=True)
# apply to all time dependent variables
for var in ds:
if 'time' in ds[var].dims:
# replace time dimension with time_resampled
vardims = ds[var].dims
newdims = [d if d!='time' else 'time_resampled' for d in vardims]
# if only time dimension, take the shortcut
if len(vardims)==1:
newval = np.bincount(inv_idx,weights=ds[var].values)/cnt
ds_r = ds_r.assign( {var: (newdims, newval)})
elif len(vardims)==2: # more than the time dimension, assume 2
N = ds[var].shape[1]
newval = np.zeros((bintime.size,N))
for i in range(N):
newval[:,i] = np.bincount(inv_idx,weights=ds[var].values[:,i])/cnt
ds_r = ds_r.assign( {var: (newdims, newval)})
else:
raise ValueError("logger.resample is implemented for 2dims only.")
# add attributes again
ds_r[var].attrs.update(ds[var].attrs)
ds_r[var].encoding.update(ds[var].encoding)
# drop original time and rename
ds_r = ds_r.drop_dims("time").rename({"time_resampled":"time"})
# add time encoding
ds_r.time.encoding.update({
"units": f"seconds since {np.datetime_as_string(ds_r.time.data[0], unit='D')}T00:00Z",
})
return ds_r
5.5. Interpolate GPS coordinates¶
#|export
def interpolate_coords(rec_gprmc, time):
"""
Interpolate lat and lon from gps records
Parameters
----------
rec_gprmc: recarray
The GPRMC records from the logger file
time: list or array of time objects
Returns
-------
ndarray, ndarray
lat and lon interpolated from GPS records to `time`
"""
time = utils.to_datetime64(time)
t0 = time[0].astype('datetime64[D]')
# coordinate variables
x1 = (time-t0)/np.timedelta64(1,'ms')
x2 = (rec_gprmc.time-t0)/np.timedelta64(1,'ms')
lat = np.interp(x1,x2,rec_gprmc.lat)
lon = np.interp(x1,x2,rec_gprmc.lon)
return lat, lon